本文最后更新于:星期二, 八月 2日 2022, 9:32 晚上
清华大学和北邮作者共著的大作,思想挺新颖但是至今为止都是挂在arxiv上。读完之后给人感觉像是草稿,机翻色彩严重……
1. 引言
近年来对于对抗样本的研究主要集中于图像领域,少部分集中在音频领域。而这两种领域的突变攻击,都局限于DNN模型,RNN模型的对抗样本生成则鲜有研究(当时)。
RNN的对抗测试面临某些挑战,概括为三方面:
- 首先,没有明显的类别标签,就没有规则来识别对抗样本。因此传统的对抗性测试对于文本生成模型等无能为力。
- 其次,人类能够察觉在文本上的微小修改,且文本扰动很难保证语义不发生变化。
- 第三,现有的基于CNN的基于神经元的覆盖度量未能考虑RNN结构的特征,因此无法直接借鉴。
本文贡献主要有以下四点:
- 针对RNN的特定计算逻辑,定义三个覆盖率指标;
- 采用覆盖率指南来获取扰动,提出state inconsistency orientation作为引导对抗样本生成的方向,生成对抗样本;
- 提出了一种针对RNN的通用对抗测试框架RNN-Test;
- 利用RNN-Test测试并优化了PTB语言模型和拼写检查器模型。
本文提出的新颖思想有:
- 在整个输入中,我们仅保留一个单词/字符的扰动即可进行修改,从而确保了微小的修改。
- 通过利用测试模型的性能指标来评估对抗性输入的质量
- 实验发现,覆盖率值与对抗性输入的质量之间没有线性关系,因此应该付出更多的努力来提高输入质量,而不是覆盖率的值
2. RNN-Test
2.1 模块简介
RNN-Test工作流程如图所示:
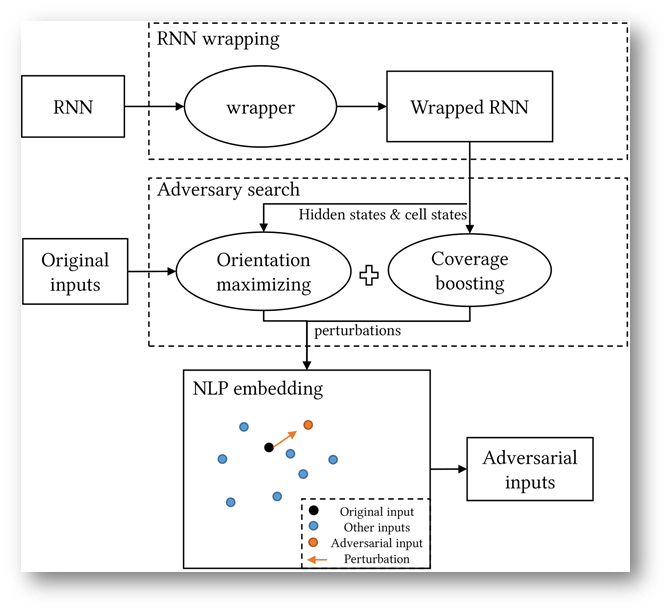
RNN-Test三个重要组成部分:
- RNN wrapper
- adversary orientation maximizing
- coverage boosting.
RNN Wrapper模块负责提取RNN模型中的hidden states和cell states。
adversary orientation maximizing模块将三个orientation方法整合,这三个orientation方法分别是
- 本文提出的state inconsistency orientation方法,
- FGSM提到的优化方法,
- DLFuzz提到的优化方法。
coverage boosting模块则通过提升覆盖率,以图在RNN的未发现空间中搜索对抗样本
adversary orientation maximizing模块和coverage boosting模块的结果将集成起来,产生一个联合目标。对这个目标进行梯度上升联合优化求最优解。
在这里,我们只是从整个顺序输入中随机修改一个单词或字符,以确保所做的修改不足以保持原始语义。
单词在词嵌入空间中,因此我们以词嵌入空间中两点的距离作为辅助判断,选取突变距离最小的输入作为对抗样本。
RNN-Test不仅可以用于分类模型,而且可以应用于序列模型。
3. 覆盖率
为了方便后面解释,有如下定义:
- S: 时间步个数
- L: 层数
- B: 批数
- E: 隐状态集合大小
- h: 隐状态集合,|h|=E
- c: cell集合
- g: gate集合
- e: 一个隐状态,e∈h
3.1 状态覆盖率的意义
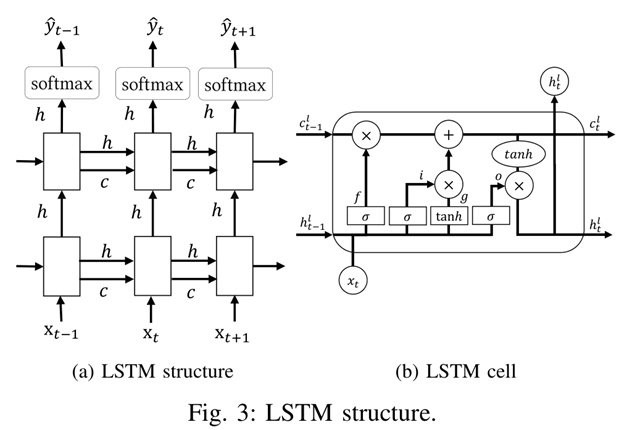
每个RNN单元在每个时间步$t$的输出都是隐藏状态向量$ht$。当输入$x$到了最后一个单词,即执行到最后一个时间步$tp$的时候,输出的还是隐状态$h{tp}$,只不过此时的$h_{tp}$能够真正代表整个序列$x$的所有信息了。之前的$h_t$是在没能读完$x$的情况下做出的草率判断。
对于LSTM单元,输出还包含表示为$c$的单元状态向量,长度与$h$相同。如果说$h$代表短期记忆,那么$c$就代表长期记忆。
对于一个输入$x$,如果特定的隐藏状态具有RNN单元输出的最大值,则其映射部分在预测结果中的概率也将更高。
其实这句话我没看懂,原文如下:
For one input, if a specific hidden state has the maximum value of the RNN cell outputs, the probabilities of its mapping part of the prediction result tend to be higher as well.
As covering the permutations of each hidden state of the RNN cell is extremely time-consuming, covering all the maximum hidden states is a feasible solution.
猜想作者应该是想要在所有时间步的$ht$中选择一个最大的$h{t’}$,计算覆盖率时只要覆盖该$h_{t’}$的就算是覆盖了。
$h$和$c$的所有分量大小在[-1,1]内,都是通过tanh函数计算得到的。本文将这个值域分割成等距离的五个部分,[-1,-0.8,-0.2、0.2、0.8、1]。通过将值范围划分为多个部分,然后记录每个部分的覆盖范围。
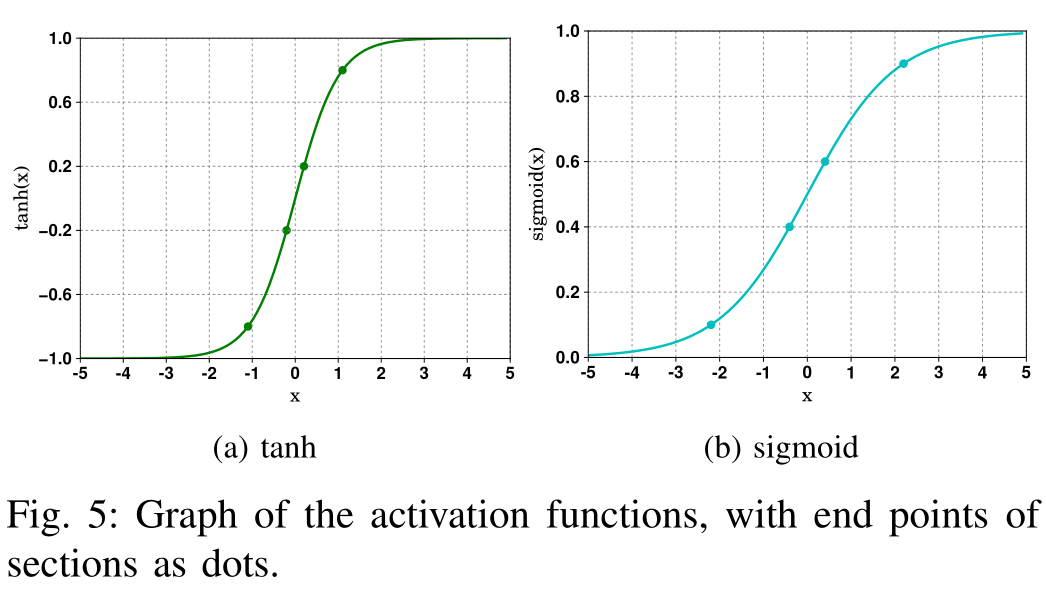
3.2 门覆盖率的意义
采用与状态覆盖相同的机制来计算门的覆盖范围。由于门的值域在[0,1],因此划分区间[0、0.1、0.4、0.6 ,0.9,1]。
3.3 覆盖率定义
Hidden state coverage
RNN中的所有Hidden State集合表示成H,H的形状为[S, L, B, E]。S为时间步个数,L为层数,B为batch数,E是每个状态向量的长度。
对于一个具体地隐状态h向量,形状为(s,l,b),其中$s\in{1,2,\dots,S}$,$l\in{1,2,\dots,L}$,$b\in{1,2,\dots,B}$,$E=|h|$。
如果一个状态分量$e\in h$且$e=\max{(h)}$,也就是说$e$是该状态分量中的最大值,那么可以说该状态$e$被覆盖了。覆盖率计算公式如下:
Cell state coverage
RNN中的所有Cell State集合表示成C,C的形状也为[S,L,B,E]。cell state的值域[-1,1]被分割成Sec块,分别是$sec1, sec_2, \dots, sec{Sec}$。每个sec可以表示成$seci=[v{i-1}, v_i],-1\leq v_i\leq 1$。
如果一个cell状态分量$e\in c$而且$\tanh(e)\in sec_i, i\in{1,2,\dots, Sec}$,就说状态分量$e$在$sec_i$中被覆盖了($e$ is covered in $sec_i$)。覆盖率公式如下:
Gate coverage
用$g$来代表门,$g\in {i,o,f}$。用来计算这些gate的状态定义为$G_g$,$G_g$的形状是[S, L, B, $E_g$],$E_g$是状态大小。
如果一个状态$e\in g$并且$\text{activation}(e)\in sec_i$,$\text{activation}$代表计算该gate所需的激活函数,那么就称状态$e$在$sec_i$中被覆盖了。门覆盖率的计算公式如下:
DX coverage
这个覆盖率是仿照DeepXplore在DNN上定义的覆盖率,将其迁移到RNN上的结果。
对于CNN,DeepXplore将每个特征图(卷积层的输出,数百个值的矩阵)视为神经元,并将平均值作为输出。
如果我们将每个单元格的隐藏状态向量$h$视为神经元,此时像PTB模型这样的普通RNN将仅由一层少于100个神经元组成。这样只需几次输入,覆盖率值便可达到100%。因此,我们将每个隐藏状态向量分量$e$视为神经元。
对于所有的隐状态集合$H$,有状态$e\in H$。如果输出值在经过max-min normalization之后$\text{out}(e)>t$,t是某个阈值,此时就称状态$e$被覆盖。计算公式如下所示:
4 对抗定向优化方法
与训练过程相反,该过程通过使得输入变异,试图升高预先定义的orientation,来引导变异过程,最终使得模型判断错误。
可以选择的orientation有以下三个:
1) state inconsistency orientation
t时刻的orientation,与t-1时刻的hidden state正相关,与t时刻的cell state正相关,与t时刻的hidden state负相关。
也就是说如果想优化state inconsistency orientation,就必须找到一个$xt$,令$h{t-1}$和$c_t$越大越好,$h_t$越小越好。
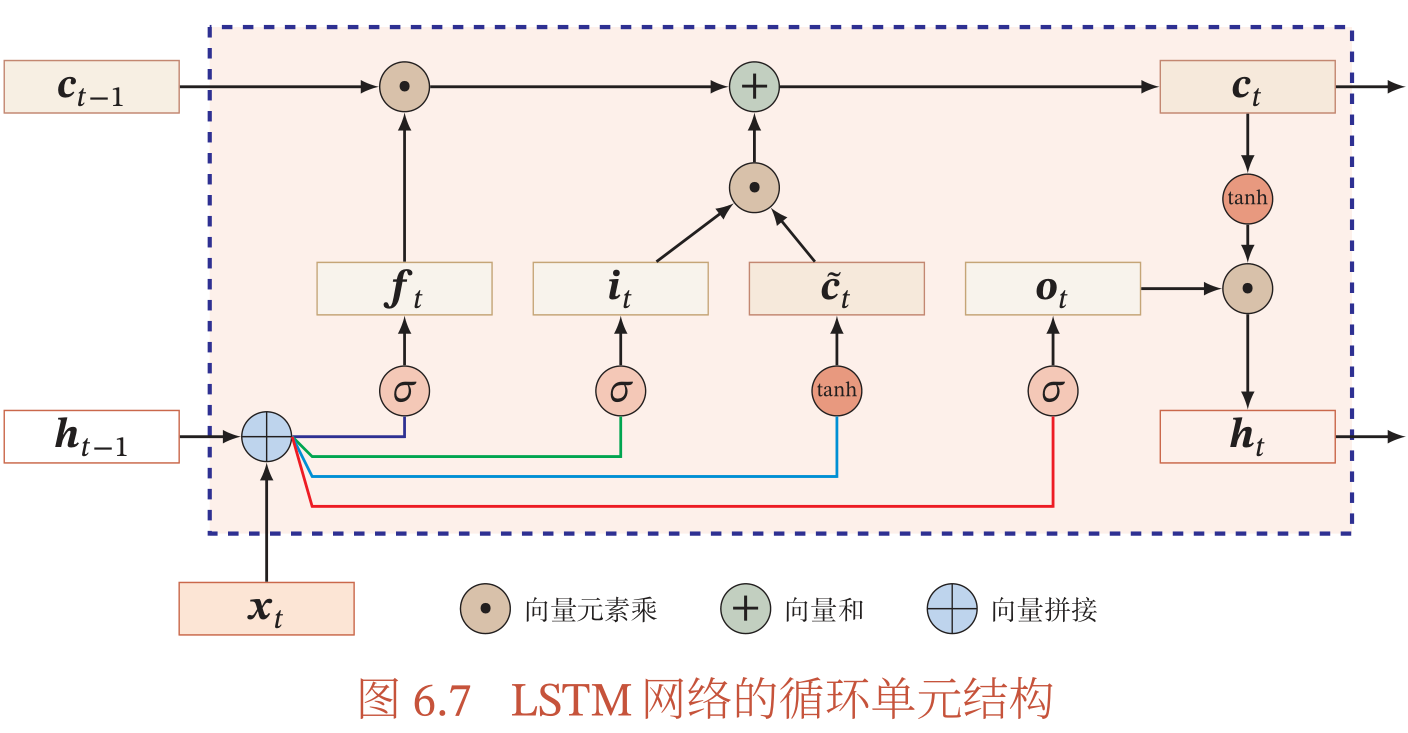
基于LSTM的设计理念,c代表较长的记忆,h代表短期记忆。
按公式可看出$ct$、$h_t$、$h{t-1}$应该是同增同减、状态一致。因此使$ct$、$h{t-1}$和$h_t$分开,就是使状态不一致程度上升。
2) Cost orientation
FGSM论文中提到的方法。全称为Fast Gradient Sign Method。该方法的优化目标是模型训练时使用的loss函数,然后利用一遍优化,计算对抗样本。
一个对抗样本攻击过程,与训练过程可以对比如下:
训练时loss函数作用是,在输入x固定的条件下,通过改变模型参数$\theta$来优化loss使之最小化。
对抗样本攻击则是在参数$\theta$固定的条件下,通过改变输入x,来优化loss使之最大化。
如果只是想要让模型出错,这种攻击手段成为无目标攻击 (Non-target Attack)
如果指定了目标,试图让x向着指定的类别突变,这种攻击就被称为 (Target Attack)。
但是突变程度有一定限制,要求突变前后图片变化小于一个阈值,意思是不要被发现。
总的来说,一个突变算法可以选择不同的优化方法,也许要选择不同的限制方法。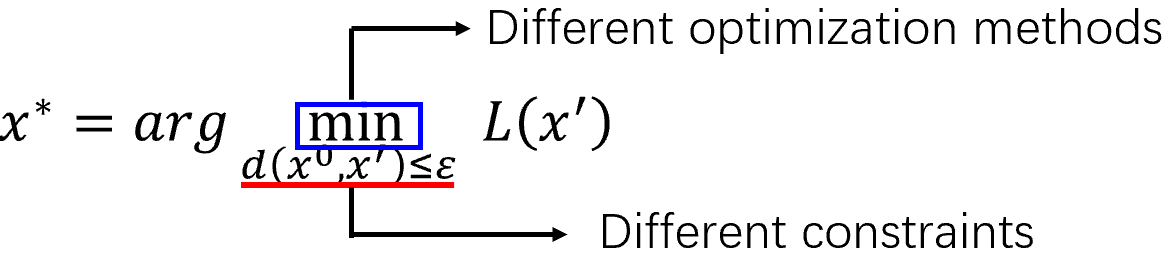
而FGSM算法选取的攻击手段是“一次求导”,通过依次计算损失函数对输入x的每个分量的偏导,如果为正数则值=1,负数则=-1,无论其大小。
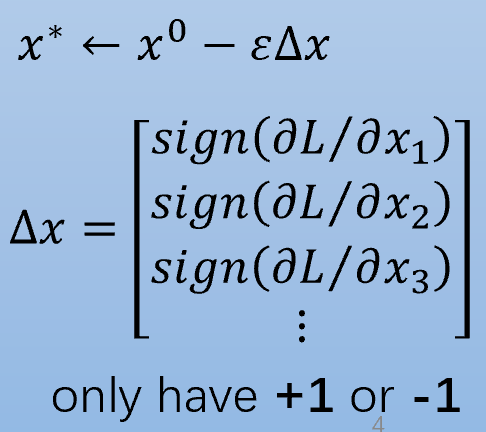
效果就是每个像素点要不就+$\epsilon$,要不就-$\epsilon$。
3) Decision boundary orientation
决策边界定向旨在降低原始预测标签的概率,并增加其他前k个标签在预测中的概率。
$\hat{y}_{t}$是softmax层的输出向量。
5. 对抗样本搜索的过程
5.1 RNN-Test整体算法
在keras的Sequence模型中,可以通过修改参数设置,使模型输出所有时间步的hidden state和cell state。
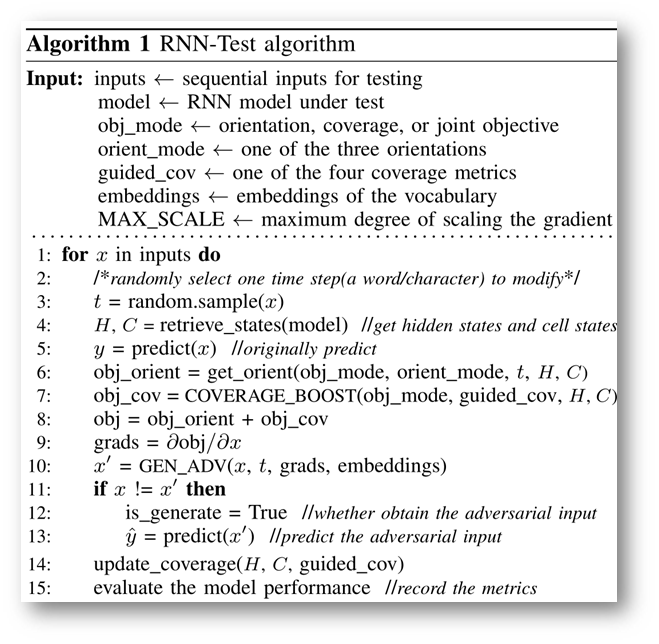
在1~8行,通过retrieve_state获得模型此时的state信息。其实我比较感兴趣retrieve_state方法是如何实现的
首先获得模型内部信息,根据优化目标计算能够最大化提升该目标的梯度方向。
然后第9~10行,根据梯度上升法,优化并生成新的变异体x。
11~13行,判断是否真的生成了能够使模型出错的对抗样本。
在15行,衡量此时模型的性能,如果是分类模型就看loss大小,如果是生成文本模型就看perplexity。
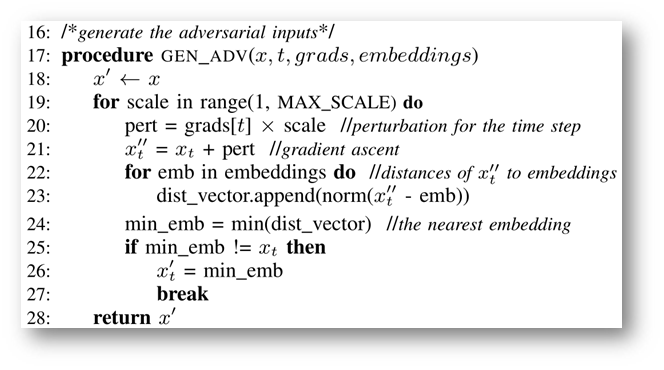
在第22~27行,生成对抗样本的过程中,对一段文本的变异方法,是通过在词嵌入空间中搜索最近的单词/字符,替换该时间步t对应的字符。
5.2 覆盖率提升方法
选择n个没被覆盖到的state,RNN-Test会尽可能提升他们的值。
RNN-Test还会挑选在边界或者端点的state,将它们的值设成边界值。
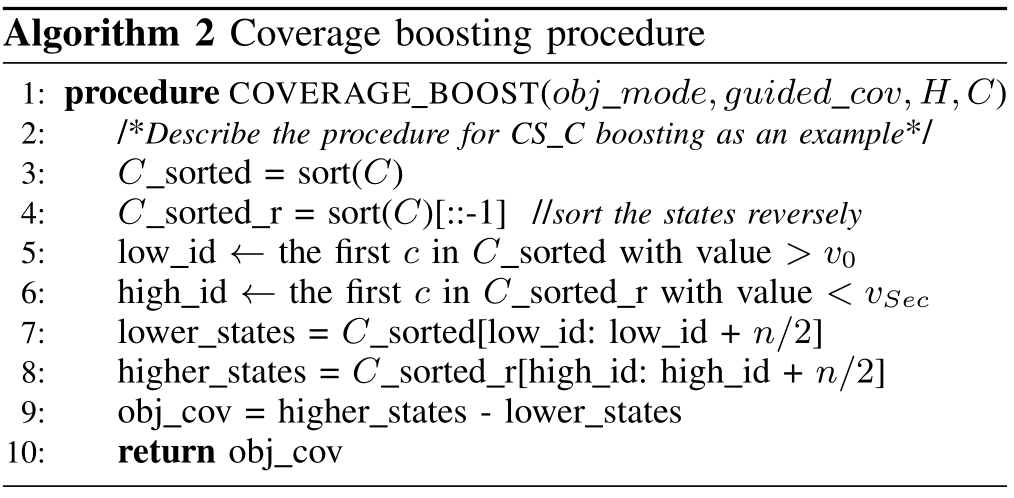
这一块我看的很乱,可能不是我的问题而是作者写作的问题。
6.总结
- 本文肯定不是作者的终稿,还有很多没说明白的地方,遣词造句也有一股中式英语的风味。
- 新颖的地方包括覆盖率,但是这一块没看懂,作者也没把公式定义明白。
- 其二是采用状态不一致程度来衡量模型不稳定性,并以此引导生成对抗样本,本来思想很新颖,但是突变样本的方法就是最简单的文本替换,在词嵌入空间中搜一个最近的单词向量。杀鸡焉用牛刀?
本博客所有文章除特别声明外,均采用 CC BY-SA 3.0协议 。转载请注明出处!